 资料来源:Qingliu Capital推荐,Qingliu的“星际运动时代”的创始人Chen Jianyu和著名财务作者的嘉宾Zhang Xiaojun。作为Tsinghua大学交叉信息学院的助理教授,陈·江先生一直在研究类人动物机器人十多年了。近年来,他参与了在机器人和人工智能的交集上进行研究。他发表了40多篇论文,用于领先的国际机器人,人工智能,控制,运输和其他领域的国际会议和期刊,其中一些论文被列入了剩下的国际会议纸张奖,例如L4DC 2022,例如IEEE IV 2021,IEEE IV 2021,以及IFAC MECC MECC MECC2021。2021。VLA(语言模型),以帮助您更多地来帮助您更多地来帮助您更多地来帮助您更多地邀请您的餐厅,并愿意成为人们的途径,并将其供您使用。
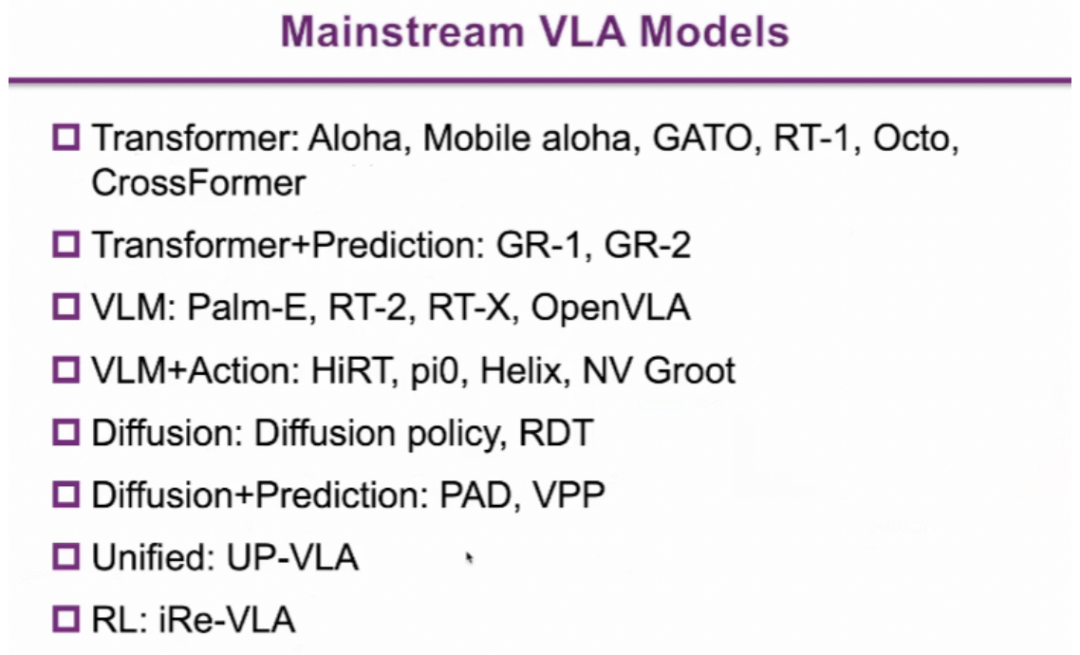
原始播客链接(您还可以直接检查上图中的QR码以收听播客):https:// www.xiaoyuzhoufm.com/episode/67f28c6e0decaeb0943fb14a?s = eyj1ijoinwy0otnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnnmgy1ztcymgy1ztcym2jingyy3m2yy3m2y4iiiiwizci6mn0%3DHTTPS: //www.bililiwa.com/video/bv1Q6rzyneni/ Timeline 02:30 Chen Jianyu's Research and Entrepreneurial Direction 04:11 Before the Explanation Begins, Ask a few small questions first 17:36 the the Current biggest variable: from dedicated model to general model (Robot Foundation possibilities of model21: 12 after the outbreak of the wave of big models, the field of机器人技术已经经历了两个阶段:从用于机器人技术的基本模型到预测机器人技术的基础模型:使用基本模型fortics(利用机器人技术中的基础模型)21:59传统的机器人技术的三个部分:计划 +理解 +理解 +理解 +促进 +促进 +的促进 +理解 +的实施 - 第一步是由i替换plansic the plansig the the Planning 23:54:llm llm llm llm a llm(不像我说:接地语言在机器人a(中文名称中:我可以做到,不是我说:将语言与机器人的可用性相结合)27:03。步骤27:52 inner onnernner独白:通过语言模型实现了推理,用语言模型体现了推理。 (名称名称:内部独白:(通过语言模型实现推理)29:51(doremi:通过删除和从计划执行中恢复的基础语言模型)(中文名称:内部独白:通过语言模型体现的推理:(通过语言模型)(通过语言模型)29:51 doremi:doremi:doremi:ninter norlogied and internologied norlogied:Emologied:Emologied emologied:Emologied emologied emodied emodied emodied emodied emodied emodied emodied emotied emotied emotied; (语言模型)29:51(doremi:通过从计划执行中删除和恢复的基础语言模型)(中文名称:内部独白:语言模型体现的推理)(独白:Embodi:Embodied Reasoning by Language Models) (Chinese Name: Inner Monologue: Embodied Reasoning by Language Models) (( Chinese Name: Inner Monologue: Driven Name: Reasoning by Language Models) (Name of Chinese: Inner Monologue: Embodied Reasoning by Language Model Inner Monologue: Em Misalignment》 (Chinese Name) 32:47 The Third Step, I Want to Further Automatically and Replace Action with Code LM (a Large Language Model Focused on与代码相关的任务)32:24《 voxposer:可组合3D地图用语言模型的机器人操纵的图值值》(中文名称:voxposer:与语言模型的合成3D值的综合3D值,具有语言模型的地图)阶段2:prestraining for Robotics for Robotics for Robotics for Robotics for Robotics 38:38:36 vla vla for thraking Foundation Models 38:36 vla端到端到端到端到端到端到端到端到端的模型(视觉 - 语言模型,视觉语言模型) - “ - ” - “非常聪明的VLA代理” 39:53关于VLA的经典纸和类别:40:17 Aloha Aloha Paper for Bimanual Manipulaturewith lowcost hardware "(Chinese name: Studying fine-grained bimalual manipulation in lowcost Whole-Body Teleoperation" (Chinese Name: Mobile Aoha: Study of two-whand Mobile Operation Usage Using Teleoperation "(Chinese Name: Mobile Aoha: Study of Two-Whand Mobile Operation Use using Teleoperation" (Chinese Name: Mobile Aoha: Study of two-Whand Mobile Office Murang operation remote) 50:15 A general agent introduces the general artificial情报代理名为Gato(中文:通用代理)52:45 RT-1纸“ RT-1:用于真实尺度控制和尺度的机器人变压器”(中文名称:RT-1:用于大型现实世界中的机器人变压器:大规模现实世界控制)59:02 octo paper octo paper:octo pape Patakaran)01:02:20交叉形式纸“缩放跨成型学习:操纵,导航,运动和航空的一种政策(中文名称:扩展的跨体性学习:操纵统一策略n,导航,移动和飞行)01:15:02棕榈-E纸“ Palm-e:一种体现的多模式LanguageModel”(中文名称:Palm-e:体现的多模式LanguageModel)01:20:02 VLA中最受欢迎的作品当前是当前最受欢迎的作品。 Mga Modelo ng Vision-Language-Aksyon na Paglilipat ng Web sa RoboticControl "(Chinese Pangalan: RT-2: Vision-Language-Action Models Transfer Web Knowledge to RoboticControl) 01:26:05 RT-Action Paper Paper" Open "Open" Open "Open" Open "Open" Open "Open" X-Embodiment: Robotic Learning Datasets and RT-X Models "(Chinese Name: Open X实施例:机器人学习数据集和RT-X模型)01:31:16“ OpenVLA:开放式视觉视觉语言行动模型“ OpenVLA:一个开源的视觉视觉语言效果模型)Jianyu的研究小组” jianyu的研究小组“ Hirt:增强了与层次的Robot:3 lairny namem namem namep:3 lober labor:3:增强机器人:3:3. alhelix, no paper, but the latest architect it 01:39:28 Pi0 Paper "πo: a vision-lanmodelong flow of guage-actionFlow for Generalrobot Control (Chinese Name: π₀: A Visual-Language-Action Flow Model For General Robot Control) 01:41:36 Nvidia recently released Grootn1 Model "Gro0t N1: An Open FoundationModel For Generalist Humanoid Robots" (Chinese name: Groot N1:打开通用类人机器人的基本模型)01:42:32“政策差异:Visuomotor策略学习。 Action01: 42: 32Diffusion》 (Chinese Name: Dispersion Strategy: Visual Motion Strategy Study by spreading action) 01:47:39" RDT-1B: A Model Formity Model Foundation for BimanualMaPulation " (Chinese Name: RDT-1B: Basic Model of Two-Hand Robots) 01:51:04 "Prediction of Action: Visual Policy Learning Via JointDenaising Process Process ((Action:" Guess: "Guess:" Prediction:研究AGHAHATA对视觉政策研究的预测:通过共同倾销过程的视觉策略策略)和以下“视频政治化n Policy: A Generalist Robot Policy with Predictive Visual Representations》 (Video Prediction Strategy: A Generalist Robot Strategy for Predicting Visual Representation) 02:03:06 Two Future Directions:" UP-VLA: PredictionModel for Embodied Agent "(UP-VLA: Not Understanding and Prediction Model for Embodied Agent)" Vision-Language-Action Model with online reinforcementlearning "(Improvement of the Language Model with online reinforcementlearning) 02:09:22您感兴趣的最后一个问题是您在文章开头的播客链接部分进行查看。
资料来源:Qingliu Capital推荐,Qingliu的“星际运动时代”的创始人Chen Jianyu和著名财务作者的嘉宾Zhang Xiaojun。作为Tsinghua大学交叉信息学院的助理教授,陈·江先生一直在研究类人动物机器人十多年了。近年来,他参与了在机器人和人工智能的交集上进行研究。他发表了40多篇论文,用于领先的国际机器人,人工智能,控制,运输和其他领域的国际会议和期刊,其中一些论文被列入了剩下的国际会议纸张奖,例如L4DC 2022,例如IEEE IV 2021,IEEE IV 2021,以及IFAC MECC MECC MECC2021。2021。VLA(语言模型),以帮助您更多地来帮助您更多地来帮助您更多地来帮助您更多地邀请您的餐厅,并愿意成为人们的途径,并将其供您使用。
原始播客链接(您还可以直接检查上图中的QR码以收听播客):https:// www.xiaoyuzhoufm.com/episode/67f28c6e0decaeb0943fb14a?s = eyj1ijoinwy0otnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnmnnnmgy1ztcymgy1ztcym2jingyy3m2yy3m2y4iiiiwizci6mn0%3DHTTPS: //www.bililiwa.com/video/bv1Q6rzyneni/ Timeline 02:30 Chen Jianyu's Research and Entrepreneurial Direction 04:11 Before the Explanation Begins, Ask a few small questions first 17:36 the the Current biggest variable: from dedicated model to general model (Robot Foundation possibilities of model21: 12 after the outbreak of the wave of big models, the field of机器人技术已经经历了两个阶段:从用于机器人技术的基本模型到预测机器人技术的基础模型:使用基本模型fortics(利用机器人技术中的基础模型)21:59传统的机器人技术的三个部分:计划 +理解 +理解 +理解 +促进 +促进 +的促进 +理解 +的实施 - 第一步是由i替换plansic the plansig the the Planning 23:54:llm llm llm llm a llm(不像我说:接地语言在机器人a(中文名称中:我可以做到,不是我说:将语言与机器人的可用性相结合)27:03。步骤27:52 inner onnernner独白:通过语言模型实现了推理,用语言模型体现了推理。 (名称名称:内部独白:(通过语言模型实现推理)29:51(doremi:通过删除和从计划执行中恢复的基础语言模型)(中文名称:内部独白:通过语言模型体现的推理:(通过语言模型)(通过语言模型)29:51 doremi:doremi:doremi:ninter norlogied and internologied norlogied:Emologied:Emologied emologied:Emologied emologied emodied emodied emodied emodied emodied emodied emodied emotied emotied emotied; (语言模型)29:51(doremi:通过从计划执行中删除和恢复的基础语言模型)(中文名称:内部独白:语言模型体现的推理)(独白:Embodi:Embodied Reasoning by Language Models) (Chinese Name: Inner Monologue: Embodied Reasoning by Language Models) (( Chinese Name: Inner Monologue: Driven Name: Reasoning by Language Models) (Name of Chinese: Inner Monologue: Embodied Reasoning by Language Model Inner Monologue: Em Misalignment》 (Chinese Name) 32:47 The Third Step, I Want to Further Automatically and Replace Action with Code LM (a Large Language Model Focused on与代码相关的任务)32:24《 voxposer:可组合3D地图用语言模型的机器人操纵的图值值》(中文名称:voxposer:与语言模型的合成3D值的综合3D值,具有语言模型的地图)阶段2:prestraining for Robotics for Robotics for Robotics for Robotics for Robotics 38:38:36 vla vla for thraking Foundation Models 38:36 vla端到端到端到端到端到端到端到端到端的模型(视觉 - 语言模型,视觉语言模型) - “ - ” - “非常聪明的VLA代理” 39:53关于VLA的经典纸和类别:40:17 Aloha Aloha Paper for Bimanual Manipulaturewith lowcost hardware "(Chinese name: Studying fine-grained bimalual manipulation in lowcost Whole-Body Teleoperation" (Chinese Name: Mobile Aoha: Study of two-whand Mobile Operation Usage Using Teleoperation "(Chinese Name: Mobile Aoha: Study of Two-Whand Mobile Operation Use using Teleoperation" (Chinese Name: Mobile Aoha: Study of two-Whand Mobile Office Murang operation remote) 50:15 A general agent introduces the general artificial情报代理名为Gato(中文:通用代理)52:45 RT-1纸“ RT-1:用于真实尺度控制和尺度的机器人变压器”(中文名称:RT-1:用于大型现实世界中的机器人变压器:大规模现实世界控制)59:02 octo paper octo paper:octo pape Patakaran)01:02:20交叉形式纸“缩放跨成型学习:操纵,导航,运动和航空的一种政策(中文名称:扩展的跨体性学习:操纵统一策略n,导航,移动和飞行)01:15:02棕榈-E纸“ Palm-e:一种体现的多模式LanguageModel”(中文名称:Palm-e:体现的多模式LanguageModel)01:20:02 VLA中最受欢迎的作品当前是当前最受欢迎的作品。 Mga Modelo ng Vision-Language-Aksyon na Paglilipat ng Web sa RoboticControl "(Chinese Pangalan: RT-2: Vision-Language-Action Models Transfer Web Knowledge to RoboticControl) 01:26:05 RT-Action Paper Paper" Open "Open" Open "Open" Open "Open" Open "Open" X-Embodiment: Robotic Learning Datasets and RT-X Models "(Chinese Name: Open X实施例:机器人学习数据集和RT-X模型)01:31:16“ OpenVLA:开放式视觉视觉语言行动模型“ OpenVLA:一个开源的视觉视觉语言效果模型)Jianyu的研究小组” jianyu的研究小组“ Hirt:增强了与层次的Robot:3 lairny namem namem namep:3 lober labor:3:增强机器人:3:3. alhelix, no paper, but the latest architect it 01:39:28 Pi0 Paper "πo: a vision-lanmodelong flow of guage-actionFlow for Generalrobot Control (Chinese Name: π₀: A Visual-Language-Action Flow Model For General Robot Control) 01:41:36 Nvidia recently released Grootn1 Model "Gro0t N1: An Open FoundationModel For Generalist Humanoid Robots" (Chinese name: Groot N1:打开通用类人机器人的基本模型)01:42:32“政策差异:Visuomotor策略学习。 Action01: 42: 32Diffusion》 (Chinese Name: Dispersion Strategy: Visual Motion Strategy Study by spreading action) 01:47:39" RDT-1B: A Model Formity Model Foundation for BimanualMaPulation " (Chinese Name: RDT-1B: Basic Model of Two-Hand Robots) 01:51:04 "Prediction of Action: Visual Policy Learning Via JointDenaising Process Process ((Action:" Guess: "Guess:" Prediction:研究AGHAHATA对视觉政策研究的预测:通过共同倾销过程的视觉策略策略)和以下“视频政治化n Policy: A Generalist Robot Policy with Predictive Visual Representations》 (Video Prediction Strategy: A Generalist Robot Strategy for Predicting Visual Representation) 02:03:06 Two Future Directions:" UP-VLA: PredictionModel for Embodied Agent "(UP-VLA: Not Understanding and Prediction Model for Embodied Agent)" Vision-Language-Action Model with online reinforcementlearning "(Improvement of the Language Model with online reinforcementlearning) 02:09:22您感兴趣的最后一个问题是您在文章开头的播客链接部分进行查看。